Il est possible d'utiliser des robots spécialement conçus pour une utilisation en classe en classe.
Ils permettront, parallèlement aux activités décrites plus haut, d'expérimenter de manière très concrète et pratique les connaissances et compétences acquises avec l'usage des logiciels et application dédiées à la programmation.
- Robots en classe : http://robots4schools.ch/
THYMIO II⚓
Site internet : https://www.thymio.org/fr:thymio
Thymio II est un petit robot doté de capteurs et de LED. Il est programmable grâce à un environnement de programmation visuel spécifique (VPL) ou bien avec le système Blockly (de Google) ou bien, pour les utilisateurs les plus avancés, avec un environnement de programmation texte (ASEBA Studio)
On peut également utiliser Scratch.
Présentation et prise en main⚓
Définition : Programmation visuelle ASEBA
Environnement de programmation visuelle pour les robots Thymio basé sur l'association de blocs-événement avec des blocs-action. Il est nécessaire d'installer le logiciel dédié.

Définition : Programmation Blockly ASEBA
Environnement de programmation par blocs basé sur le système Blockly, de Google, et adapté pour les robots Thymio.

Définition : Programmation Aseba SCRATCH
Comment programmer Thymio II avec Scratch ?

Méthode : Procédure d'installation
1. Télécharger la version hors-ligne (offline) de Scratch 2 (explications en anglais) et l'installer.
https://scratch.mit.edu/scratch2download
Tutoriel vidéo de l'installation fait par Techykids : http://www.techykids.com/scratch-with-thymio/
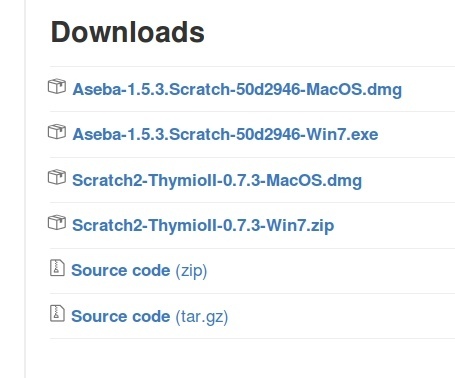
2. Télécharger et décompresser le fichier ASEBASCRATCH (c'est ce qui permet la communication entre Scratch et Thymio)
https://github.com/davidjsherman/inirobot-scratch-thymioII/releases/tag/v0.7.3-alpha
Choisir le fichier Scratch2-ThymioII-0.7.3 (pour MacOS ou pour Windows) :
3. Si les logiciels du Thymio ne sont pas déjà installés, les télécharger et les installer :
Méthode : Comment utiliser Aseba Scratch ?
1. Brancher le robot (fil branché sur un port USB ou sans fil avec le dongle dans un port USB).
2. Ouvrez le répertoire "Scratch2-ThymioII-0.7.3", ouvrir le fichier Scratch2-ThymioII
3. Lancer le logiciel Scratch 2 à partir d'un exemple (voir répertoire exemples).
4. Programmer le robot en utilisant notamment les blocs supplémentaires Scratch dédiés au Thymio.
Voir description dans le document PDF ci-dessous :
On peut aussi ouvrir dans Scratch des exemples fournis dans le pack installé à la 2ème étape. Certains exemples avancés montrent une synchronisation possible entre la scène Scratch et le robot physique.
Ressources⚓
À la découverte de Thymio
Cette série de 4 vidéos présente le robot Thymio et les différentes possibilités de la programmer.
Complément : Références et tutoriel complet pour la programmation visuelle VPL
Fiche de référence de la programmation visuelle VPL :
Tutoriel complet :
Premiers pas en robotique avec le robot Robot Thymio et l'environnement Aseba/VPL
Complément : Fiches pédagogiques pour Thymio
Ce document très complet a été produit par les ateliers Canopé de l'académie de Besançon qui ont accompagné plusieurs projets dans des écoles et collège.
Les enseignants ont travaillé avec deux types de robots programmables : le robot BeeBot et le robot Thymio.
Vous retrouverez dans ce document toutes les fiches pédagogiques présentant les activités mises en place dans les classes de cycle 1 à 4 avec le robot Thymio.
Vous y trouverez aussi les témoignages vidéo sur ces activités de classe.
Un travail remarquable à la disposition de tous, destiné plus particulièrement aux enseignants qui cherchent des pistes pour se lancer dans ces activités qui figurent désormais dans les programmes scolaires.
À connaître et à conserver !
Complément : Séquence Inirobot scolaire "Langages et robotique"
Encore un travail remarquable de 3 professeurs des écoles - conseillers pédagogiques de l'académie de Bordeaux, en collaboration avec l'INRIA dans le but d'initier les élèves de cycle 2 et 3 aux notions d'algorithmique et de programmation par l'intermédiaire d'activités menées avec des robots programmables de type Thymio.
La séquence complète se décompose en 12 séances décrites vraiment dans le détail et constitue le document "central" qui est proposé en téléchargement sous une licence "vraiment" libre de type Creative Commons CC-BY, cela mérite d'être souligné ! Sont également accessibles et téléchargeables sur cette page des documents annexes, eux aussi librement téléchargeables (CC-BY).
À connaître absolument.
Tous les documents annexes sont à télécharger sur cette page :
http://tice33.ac-bordeaux.fr/Ecolien/Langagesetrobotique/tabid/5953/language/fr-FR/Default.aspx
BLUEBOT⚓
Présentation⚓
BlueBot est un robot programmable simple, spécialement conçu pour les jeunes élèves de maternelle et de début de cycle 2.
La programmation se fait par l'enregistrement d'une séquence de déplacements et d'actions saisies directement au moyen des touches sur le corps de l'appareil.
BlueBot est le successeur légèrement plus évolué du robot BeeBot (aux couleurs d'une abeille, jaune et noir) qui est similaire du point de vue du fonctionnement.
BlueBot peut également se programmer depuis une application tablette dédiée. Cette application permet de visualiser sur l'écran les déplacements réels du robot tels qu'ils ont été programmés.
Exemple :
Programmation simple⚓
Méthode : ... en utilisant les boutons de commande directement sur le robot

Les touches de BeeBot ou BlueBot.

Méthode : ... avec l'application tablette Bluebot
- liée au robot par bluetooth sans paramétrage
- création du programme avec des cartes magnétiques, puis envoi au robot
- possibilité de vérifier, modifier, compléter son programme
- possibilité de combiner plusieurs réglettes pour allonger le programme
- instruction "boucle"
Méthode : ... avec la réglette de programmation

- liée au robot par bluetooth sans paramétrage
- création du programme avec des cartes magnétiques, puis envoi au robot
- possibilité de vérifier, modifier, compléter son programme
- possibilité de combiner plusieurs réglettes pour allonger le programme
- instruction "boucle"
Ressources⚓
Conseil : Fiches pédagogiques pour Bluebot
Ce document très complet a été produit par les ateliers Canopé de l'académie de Besançon qui ont accompagné plusieurs projets dans des écoles et collège.
Les enseignants ont travaillé avec deux types de robots programmables : le robot BeeBot et le robot Thymio.
Vous retrouverez dans ce document toutes les fiches pédagogiques présentant les activités mises en place dans les classes de cycle 1 avec le robot BeeBot.
Vous y trouverez aussi les témoignages vidéo sur ces activités de classe.
Un travail remarquable à la disposition de tous, destiné plus particulièrement aux enseignants qui cherchent des pistes pour se lancer dans ces activités qui figurent désormais dans les programmes scolaires.
À connaître et à conserver !
Complément : Beebot : le petit robot pour apprendre à coder à l'école
Quelques ressources et liens intéressants sur le site VousNousIls :
http://www.vousnousils.fr/2016/09/15/beebot-le-petit-robot-pour-apprendre-a-coder-a-lecole-592161
DRONE PARROT AIRBORNE NIGHT⚓

Quels modes de contrôle ?⚓


Un projet drones et robots en SEGPA⚓
Impossible d'accéder à la ressource audio ou vidéo à l'adresse :
La ressource n'est plus disponible ou vous n'êtes pas autorisé à y accéder. Veuillez vérifier votre accès puis recharger le média.
Fiche descriptive du projet : http://www.cndp.fr/agence-usages-tice/temoignages/initiation-a-la-programmation-avec-les-drones-1268.htm
Une plateforme de défis⚓

sur internet : http://defidrone.jimdo.com/